ROS Network Settings
Setting up a ROS Network
To support custom ROS messages, the message source code must be built within the Linux development environment. MORAI SIM specific messages are distributed at the following link:
https://github.com/morai-developergroup/morai_msgs
For more detailed instructions in setting up the ROS environment, please refer to the ROS manual and the ROS quickstart guide.
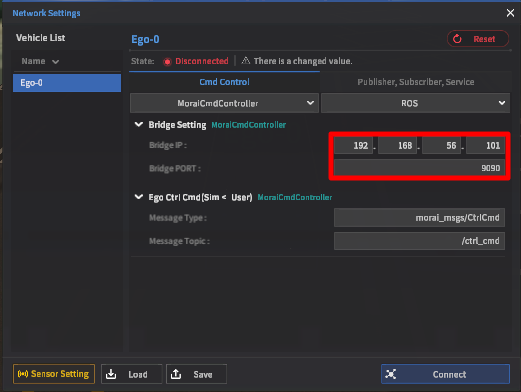
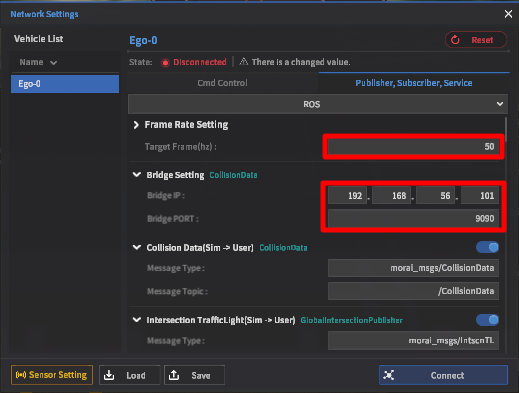
Within the simulator, go to the Network Settings panel, select ROS from the drop-down menu for both Cmd Control and Publisher/Subscriber/Service tabs, then configure the rosbridge IP, topic names, and signal frequency.
Interface Details and Message Structure
ROS messages follow a Publish-Subscribe model, or a Service model, and are organized as such in this interface sheet.
Certain message components follow the common_msgs types maintained by ROS and are noted as such in each table’s type field.
Ego Ctrl Cmd
MoraiCmdController sends command messages to the ego-vehicle.
ROS message details
Message Type: morai_msg/CtrlCmd
Default Topic: /ctrl_cmd
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | longCmdType | int32 | Determines the control type. | |
2 | accel | float64 | - | Accelerator pedal input ranges from 0 to 1 |
3 | brake | float64 | - | Brake pedal input ranges from 0 to 1 |
4 | steering | float64 | rad | Front wheel angle input in radians |
5 | velocity | float64 | km/h | (Only active if CmdType == 2) |
6 | acceleration | float64 | m/s2 | (Only active if CmdType == 3) |
Ego Vehicle Status
MoraiInfoPublisher returns the current state values of the ego-vehicle (simulator → user).
ROS message details
Message Type: morai_msgs/EgoVehicleStatus
Default Topic: /Ego_topic
NOTE Vehicle position is expressed in the geographic reference frame, following the ENU coordinate system (x: east, y: north, z: up)
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | Message header |
2 | unique_id | int32 | - | Unique identifier number of the object |
3 | acceleration | Current ego-vehicle acceleration | ||
4 | position | m | Current ego-vehicle position | |
5 | velocity | Current ego-vehicle velocity | ||
6 | heading | float64 | deg | Current heading angle value |
7 | accel | float32 | - | Accelerator pedal input ranges from 0 to 1 |
8 | brake | float32 | - | Brake pedal input ranges from 0 to 1 |
9 | wheel_angle | float32 | rad | Current wheel angle of the front wheels |
Object Info
MoraiObjectInfoPublisher contains information about each object placed in the scene (simulator → user).
ROS message details
Message Type: morai_msgs/ObjectStatusList
Default Topic: /Object_topic
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | num_of_npcs | int32 | - | Total number of NPC vehicles placed in the scene |
3 | num_of_pedestrian | int32 | - | Total number of pedestrians placed in the scene |
4 | num_of_obstacle | int32 | - | Total number of obstacles (static objects) placed in the scene |
5 | npc_list | - | Full list of NPC vehicles | |
6 | pedestrian_list | - | Full list of pedestrians | |
7 | obstacle_list | - | Full list of obstacles (static objects) |
Object Status
The ObjectStatus type is a message type for the object lists used in MoraiObjectInfoPublisher and does not have its own ROS topic.
ROS message details
Message Type: morai_msgs/ObjectStatus
NOTE Vehicle position is expressed in the geographic reference frame, following the ENU coordinate system (x: east, y: north, z: up)
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | unique_id | int32 | - | Unique identifier number of the object |
2 | type | int32 | - | 0: Pedestrian, 1: NPC vehicle, 2: Static object (obstacle), -1: Ego-vehicle |
3 | name | string | - | The given name of the object |
4 | heading | float64 | - | Heading angle of the object |
5 | velocity | Current object velocity | ||
6 | acceleration | Current object acceleration | ||
7 | size | m | Object size (width, length, height) | |
8 | position | m | Current object position |
Multi Ego Setting
MultiEgoTransformHandler enables the simulator to set multiple egovehicles in the same scene, outputting all egovehicle-related variables for each unique ego-vehicle (user → simulator).
ROS message details
Message Type: morai_msgs/MultiEgoSetting
Default Topic: /ego_setting
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | number_of_ego_vehicle | int32 | - | The number of egovehicles to be controlled through MutliEgoSetting |
2 | camera_index | int32 | - | The ID of the vehicle the camera is currently centered on |
3 | ego_index | int32[] | - | Unique identifier number of the ego-vehicle |
4 | global_position_x | float64[] | X-axis coordinate value of the current position | |
5 | global_position_y | float64[] | Y-axis value of the current position | |
6 | global_position_z | float64[] | Z-axis value of the current position (elevation) | |
7 | global_roll | float32[] | Current roll angle value | |
8 | global_pitch | float32[] | Current pitch angle value | |
9 | global_yaw | float32[] | Current heading angle value | |
10 | velocity | float32[] | Current vehicle speed | |
11 | gear | int8[] | - | 1: Parking, 2: Reverse, 3: Neutral, 4: Drive |
12 | ctrl_mode | int8[] | - | 1: keyboard mode, 16: automode |
Collision Data
CollisionData alerts and logs any data on ego-vehicle collision events that occur in the scene.
ROS message details
Message Type: morai_msgs/CollisionData
Default Topic: /CollisionData
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | global_offset_x | float32 | The x-axis position of the collided object w.r.t the map coordinate syste | |
3 | global_offset_y | float32 | The y-axis position of the collided object w.r.t the map coordinate system | |
4 | global_offset_z | float32 | The z-axis position of the collided object w.r.t the map coordinate system | |
5 | collision_object | - | Details of the collided object |
NPC Vehicle Collision Data
VehicleCollisionInfoPublisher returns collision information between NPC vehicles.
ROS message details
Message Type: morai_msgs/VehicleCollisionData
Default Topic: /VehicleCollisionData
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | collisions | - | Contains a list of NPC vehicles involved in a collision |
Vehicle Collision List
The VehicleCollision type is a message type for the collisions lists used in VehicleCollisionInfoPublisher and does not have its own ROS topic.
ROS message details
Message Type: morai_msgs/VehicleCollision
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | crashed_vehicles | - | Full list of crashed NPC vehicles |
Get Traffic Light Status
TLCtrlPublisher reports the current state of a traffic light.
ROS message details
Message Type: morai_msgs/GetTrafficLightStatus
Default Topic: /GetTrafficLightStatus
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | trafficLightIndex | string | - | Unique identifier string for each traffic light |
3 | trafficLightType | int16 | - | Defines the traffic light type and configuration 0: Red/Yellow/Green |
4 | trafficLightStatus | int16 | - | Defines which light is currently lit 1: Red Combined lights (multiple lights on simultaneously) can be applied using standard bitwise operations |
Set Traffic Light Control
TLCtrlSubscriber transmits traffic light control commands.
ROS message details
Message Type: morai_msgs/SetTrafficLight
Default Topic: /SetTrafficLight
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | trafficLightIndex | string | - | Unique identifier string for each traffic light |
2 | trafficLightStatus | int16 | - | Defines which light is currently lit 1: Red |
Get Intersection Status
IntersectionStatusPublisher reports the current status of any custom intersections.
ROS message details
Message Type: morai_msgs/IntersectionStatus
Default Topic: /InsnStatus
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | intersection_index | string | - | Unique identifier string for each intersection |
3 | intersection_status | int16 | - | Current intersection status |
4 | intersection_status_time | float32 | - | The amount of time the intersection has maintained its current state |
Set Intersection Control
IntersectionControlSubscriber sends control commands to the intersections for V2X applications.
ROS message details
Message Type: morai_msgs/IntersectionControl
Default Topic: /InsnControl
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | intersection_index | string | - | Unique identifier string for each intersection |
3 | intersection_status | int16 | - | Current intersection status |
4 | intersection_status_time | float32 | - | The amount of time the intersection has maintained its current state |
Scenario Load
MORAISLSubscriber instructs the simulator to load specific pre-built scenarios. Users may set options to load only desired features.
ROS message details
Message Type: morai_msgs/ScenarioLoad
Default Topic: /ScenarioLoad
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | file_name | string | - | The scenario file to be loaded |
2 | delete_all | bool | - | If True, deletes all agents in the scene before loading |
3 | load_network_connection_data | bool | - | If True, loads network connection settings |
4 | load_ego_vehicle_data | bool | - | If True, loads ego-vehicle settings data |
5 | load_surrounding_vehicle_data | bool | - | If True, loads NPC vehicle scenario settings data |
6 | load_pedestrian_data | bool | - | If True, loads pedestiran scenario settings data |
7 | load_object_data | bool | - | If True, loads object scenario data |
8 | set_pause | bool | - | Determines whether to immediately pause the simulation after the scenario loads |
Save Sensor Data
SensorSyncDataSubscriber saves sensor data for the current simulation frame.
ROS message details
Message Type: morai_msgs/SaveSensorData
Default Topic: /SaveSensorData
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | is_custom_file_name | bool | - | Determines if the save file name is custom input by the user |
2 | custom_file_name | string | - | The custom save file name input by the user |
3 | file_dir | string | - | The full path string of the save file |
Turn Signal Lamp Control
Lamps controls the turn signal lights of the vehicle.
ROS message details
Message Type: morai_msgs/Lamps
Default Topic: /lamps
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | turnSignal | int8 | - | 0: No signal, 1: Left turn signal, 2: Right turn signal |
3 | emergencySignal | int8 | - | 0: No signal, 1: Emergency lamps on |
Replay Info Publisher
MoraiReplayInfoPublisher publishes all vehicle movements when the Replay feature is used. Data is published to the user from the simulator.
ROS message details
Message Type: morai_msgs/ReplayInfo
Default Topic: /ReplayInfo_topic
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | ego_acc | float64 | - | Accelerator pedal input ranges from 0 to 1 |
3 | ego_brake | float64 | - | Brake pedal input ranges from 0 to 1 |
4 | ego_steer | float64 | deg | Current wheel angle of the front wheels |
5 | orientation | - | Current orientation | |
6 | linear_acceleration | Current acceleration | ||
7 | angular_velocity | Current angular velocity | ||
8 | num_of_npcs | int32 | - | Total number of NPC vehicles placed in the scene |
9 | num_of_pedestrian | int32 | - | Total number of pedestrians placed in the scene |
10 | num_of_obstacle | int32 | - | Total number of obstacles (static objects) placed in the scene |
11 | npc_list | - | Full list of NPC vehicles | |
12 | pedestrian_list | - | Full list of pedestrians | |
13 | obstacle_list | - | Full list of obstacles (static objects) |
Simulation Process Status Publisher
MoraiSimProcStatusPublisher
ROS message details
Message Type: morai_msgs/MoraiSimProcStatus
Default Topic: /sim/process/state/msg/MoraiSimProcStatus
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | header | Header | - | |
2 | latest_command_time | - | Latest time measurement to be received by the simulation process handler | |
3 | command_result | int8 | - | 0x00: initial, 0x01: success, 0x10: command failed, 0x20: failed rosbag file load, 0x30: loaded rosbag but failed |
4 | current_mode | int8 | - | 0x01: simulation mode, 0x10: replay mode |
5 | current_status | int8 | - | 0x01: running, 0x10: paused, 0x20: paused and reached end of rosbag file |
Sensor Pose Subscriber
SensorPoseSubscriber controls the position and orientation of a designated sensor according to input commands.
ROS message details
Message Type: morai_msgs/SensorPosControl
Default Topic: /SensorPosControl
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | sensor_index | int16 | - | Unique identifer number of the sensor |
2 | pose_x | float32 | m | |
3 | pose_y | float32 | m | |
4 | pose_z | float32 | m | |
5 | roll | float32 | rad | Sensor roll angle |
6 | pitch | float32 | rad | Sensor pitch angle |
7 | yaw | float32 | rad | Sensor yaw angle |
Service Response
MoraiServiceResponse
ROS message details
Message Type: morai_msgs/MoraiSrvResponse
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | result | bool | - |
Simulator Network
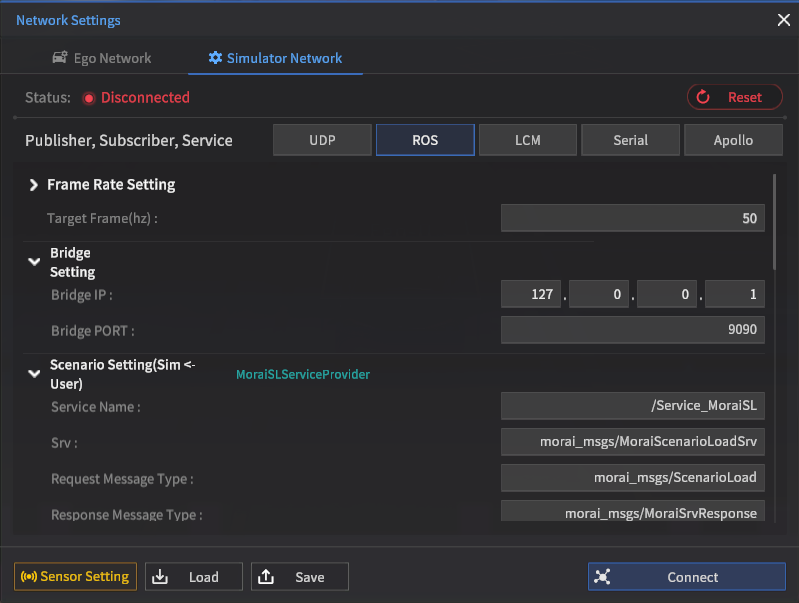
Simulator Network
Simulator Network configurations are as above. Refer to all the attributes shown in the picture before connecting to the server. This includes the type of Publisher, Subscriber, Service, Frame Rate Setting, Bridge Setting, and Scenario Setting.
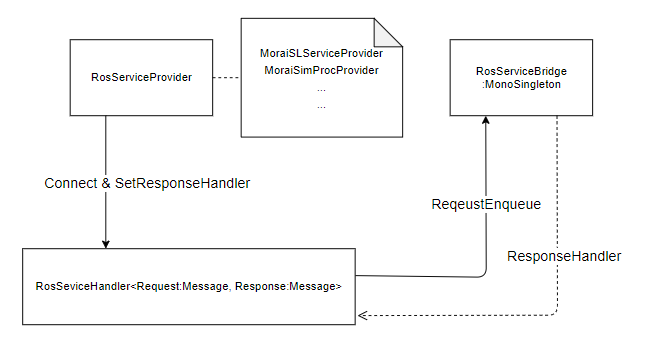
ROS Service Types
MORAI SIM can also use Service Types within ROS to control the simulation.
Data Replay Service
MoraiSimProcServiceProvider
ROS service details
Service: morai_msgs/srv/MoraiSimProcSrv
Service Name: /Morai_SimProc
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | request | MoraiSimProcHandle | - | |
2 | response | MoraiSrvResponse | - | Contains a simple boolean with the resposne |
Scenario Load
MoraiSLServiceProvider
ROS service details
Service: morai_msgs/srv/MoraiScenarioLoadSrv
Service Name; /Service_MoraiSL
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | request | ScenarioLoad | - | |
2 | response | MoraiSrvResponse | - |
Traffic Light Call
MoraiSLServiceProvider
ROS service details
Service: morai_msgs/srv/MoraiTLInfoSrv
Service Name: /Morai_TLSrv
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | request | MoraiTLIndex | - | |
2 | response | MoraiTLInfo | - |
Event Control Request
MoraiEventCmdServiceProvider
ROS service details
Service: morai_msgs/srv/MoraiEventCmdSrv
Service Name: /Service_MoraiEventCmd
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | request | EventInfo | - | |
2 | response | MoraiEventCmdSrv | - |
Vehicle Specification Request
Morai Vehicle Spec Service Provider
ROS service details
Service: morai_msgs/srv/MoraiVehicleSpecSrv
Service Name: /Service_MoraiVehicleSpec
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | request | VehicleSpecIndex | - | |
2 | response | VehicleSpec | - |
Map Data Request
Morai Map Spec Service Provider
ROS service details
Service morai_msgs/srv/MoraiMapSpecSrv
Service Name: /Service_MoraiMapSpec
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | request | MapSpecIndex | - | |
2 | response | MapSpec | - |