Capture sensor data
Record all of the data produced by each of the different sensor models configured onto the ego-vehicle using Sensor Capture Mode.
Sensor Capture Mode differs from simply connecting sensor models to the ego-vehicle in that instead of streaming a single data stream (i.e. RGB image feed for the camera sensor model), once the record command is received, every data source is captured simultaneously.
Using the camera sensor model as an example, enabling Sensor Capture Mode will record the RGB image, semantic segmentation image, and instance segmentation image all at once.
Preparing sensors for Capture Mode
First off, before enabling Sensor Capture Mode, all sensors must be connected and configured correctly. Refer to this link for detailed sensor setup instructions.
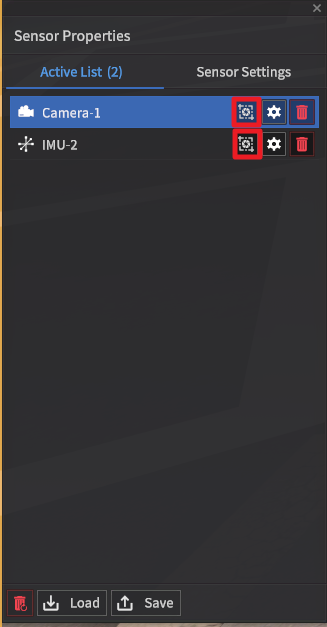
Second, each sensor must be toggled by enabling the Sensor Capture button (see screenshot below) from the active Sensor List.
Important change notes for version 22.R1.0
Sensor Capture Mode will now apply noise error consistently across all point cloud data regardless of intensity values.
Fixed issues with VLP32, H800, M1600 lidar model output when using Sensor Capture Mode.
Recording sensor data with ROS
Integrate sensor data recording by creating a routine in ROS with the SensorSyncData subscriber.
SensorSyncData Subscriber when enabled, saves recorded sensor data in the designated directory. (User → Sim)
Message Type: morai_msgs/msg/SaveSensorData
Default Topic: /SaveSensorData
No | Name | Type | Unit | Remarks |
|---|---|---|---|---|
1 | is_custom_file_name | bool | - | If False, the default save directory will be used. If True, allows the user to set a custom save point. |
2 | custom_file_name | string | - | (True if is_custom_file_name is also true): Sets the file name of the save file |
3 | file_dir | string | - | (True if is_custom_file_name is also true): Sets the destination directory of the save file |
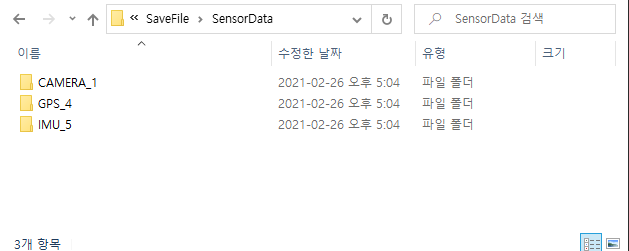
Sensor data is saved in the default save directory at MoraiLauncher_{os}_Data\SaveFile\SensorData. Saved data is divided into folders by sensor type.
Recording sensor data manually with the keyboard
Hitting the Space Bar will save all sensor data (all sensors must be properly connected)
Sensor data is saved in the default save directory at MoraiLauncher_{os}_Data\SaveFile\SensorData