A Denied Area is a region of the map that can be designated by the user to affect different systems of the ego-vehicle when the ego-vehicle enters said designated area. The name Denied Area originates from denial-of-service, the term used to refer to when GPS receivers lose signal in denied regions such as tunnels and underpasses.
Create a Denied Area from the main menu by navigating to Edit >> Scenario >> Map Edit Mode.
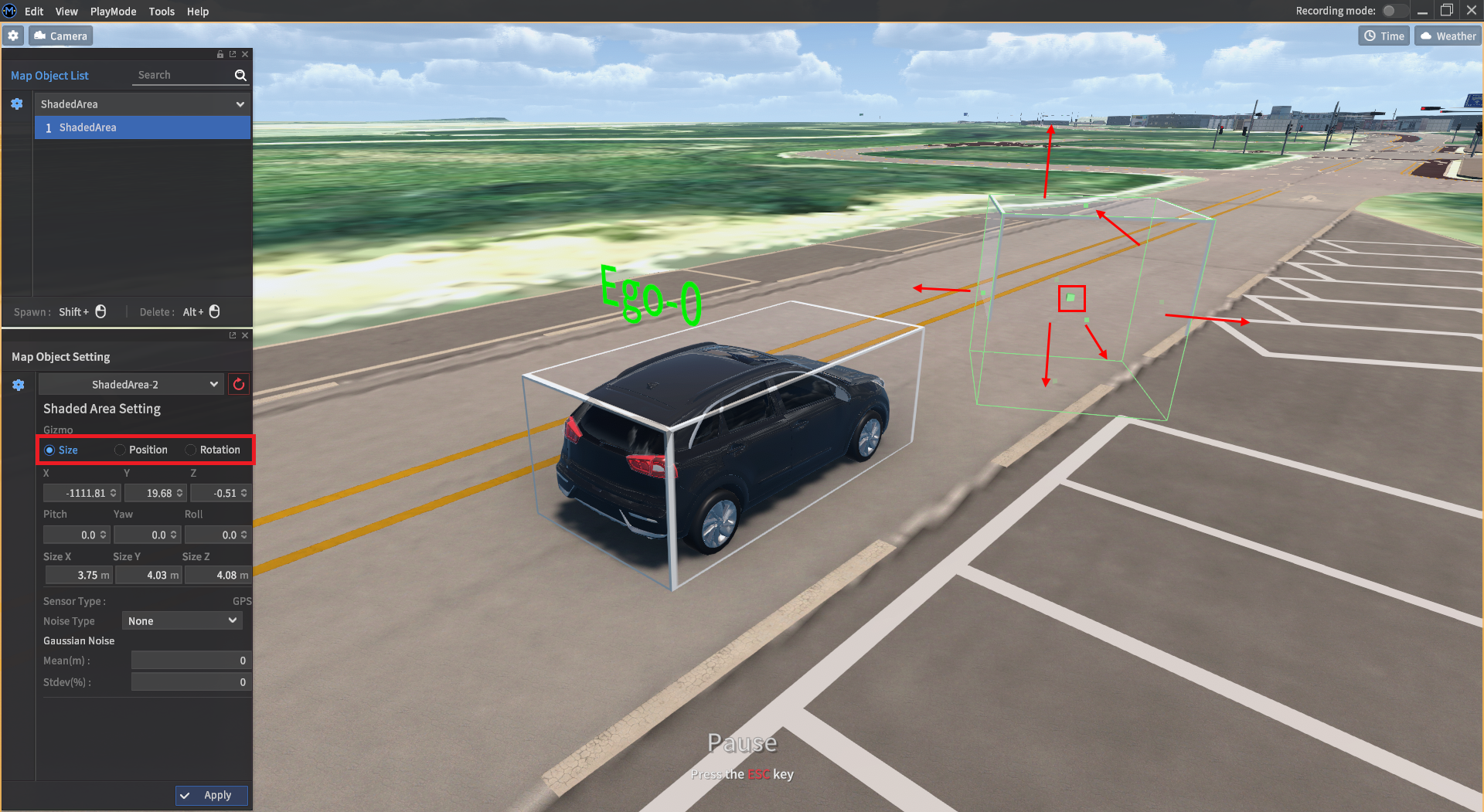
Placing and resizing Denied Areas
Select ShadedArea (naming to be changed) from the Map Object List window. Once selected, Shift + Left Click to place an initial cube into the scene. Denied Areas are currently rectangular in shape.
Adjustable parameters are as follows:
Position: The position of the area along the x, y, and z axes.
Rotation: The orientation of the area listed in order of roll, pitch, and yaw.
Scale: The size of the area along its x, y, and z axes.
You can also click and drag the faces of the rectangle to adjust the size of the Denied Area within the simulation scene.
Setting up Denied Area sensor effects
Once the Denied Area is selected, additionally configure which sensors will be affected within the area. All sensors can be set to Blackout, which disables the sensor, or Noise, which enables each sensor's specific noise models.
GPS
Blackout disables all noise models, then sets Latitude, Longitude, and Altitude values to 0.
Noise sets the GPS noise model to Gaussian Noise.
IMU
Blackout sets Orientation, Angular Velocity, and Linear Acceleration values to 0.
Noise sets the IMU noise model to enable its Gaussian, Bias-Instability, and Random Walk noise models.
Lidar
Blackout disables all noise models, then sets point cloud data values as empty values.
Noise sets the lidar noise model to Gaussian Noise.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.