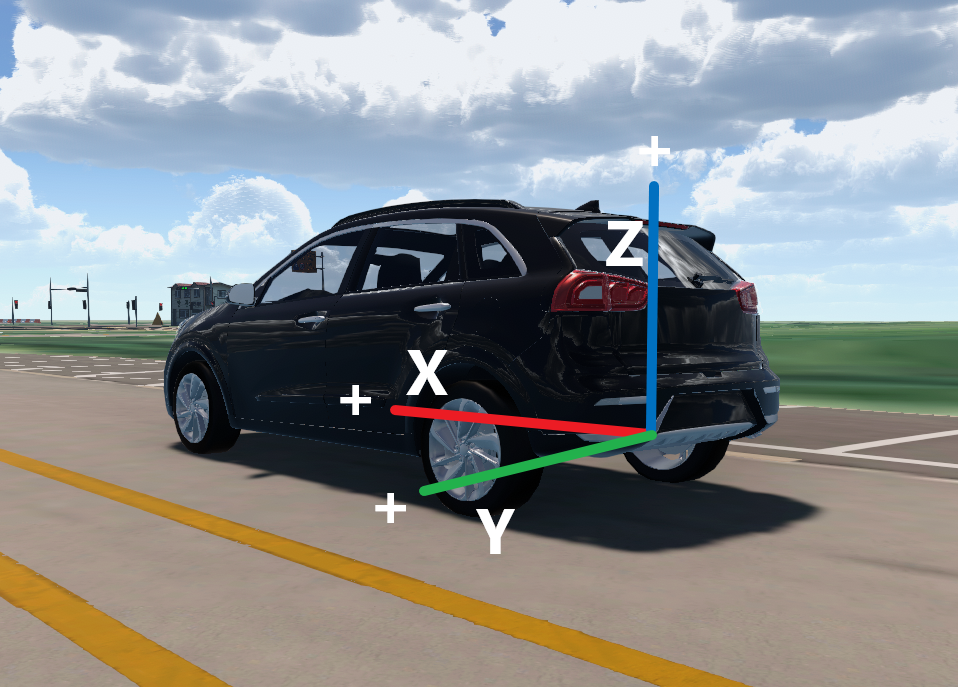
The origin of the Vehicle Coordinate System is defined as the midpoint of the axis of the rear axle (see figures below).
List of vehicle-related coordinate systems
This page demonstrates the 3D coordinate system used in the virtual environment to calculate the coordinate of vehicle in the space. Each axis represents different domain to comprise the 3D area. More detailed information are listed below.
Global coordinate frame (vehicle position relative to the map)
pose_x, pose_y, pose_z
Vehicle coordinate frame (sensor position relative to the vehicle origin)
x, y, z
The origin of coordinates is the center between rear wheels
The x axis is the real wheel axis
The x axis is parallel to the ground and perpendicular to the y axis of the rear wheel.
The z axis is perpendicular to the ground
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.