UDP quick start manual
This Quick Start Manual is a quick walkthrough to set up an interface between MORAI SIM and a sample autonomous driving algorithm stack. It is intended to provide first-time users a chance to familiarize themselves with the different features of MORAI’s simulation environment. It will not provide in-depth explanations or how-to’s for specific features and/or functions - please refer to the rest of the documentation for details.
NOTICE All examples in this guide are run on the K-City Map (map code: R_KR_PG_K-City) distributed with MORAI SIM. If you do not have access to this map, please contact your account manager or reach out to a representative over any of our channels for details.
UDP Quick Start Manual
UDP Workspace Setup
Install Python
Recommended version: 3.7.5
Install Dependent Python Packages
Windows
pip install opencv-contrib-python
Linux
$sudo pip3 install opencv-contrib-python
Simulator Network Settings
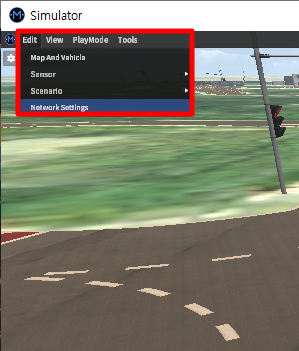
From the main menu bar, go to Edit >> Network Settings.
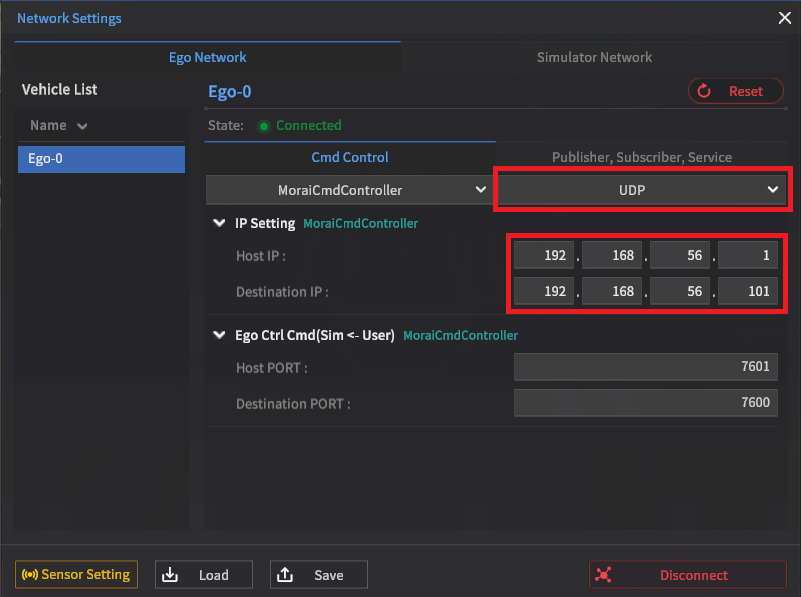
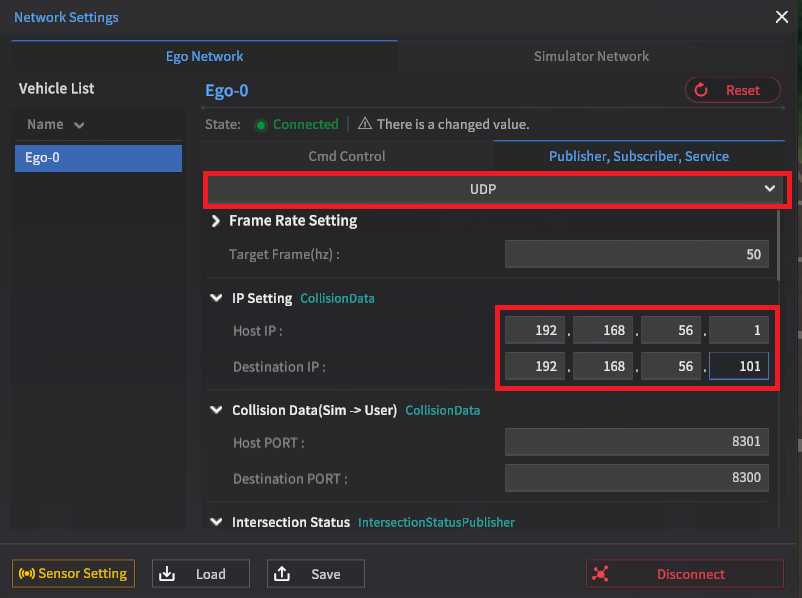
Enter IP addresses and port numbers and click Apply.
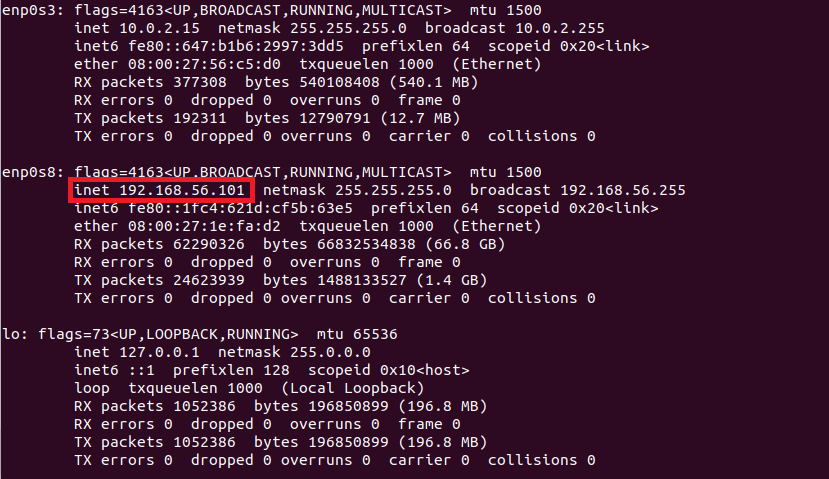
Open Terminal to check Bridge IP to input
Windows - Windows (Local Environment)
Host IP : 127.0.0.1
Destination IP : 127.0.0.1
Windows (Run Simulator) - Ubuntu (Run Example Code)
For Windows terminal, input ipconfig; for Ubuntu terminal, input ifconfig.
Host IP: 192.168.56.1
Destination IP: 192.168.56.103

Drive Test
Download example code from the link below : https://www.dropbox.com/sh/zjkdfzpy5071dqk/AACMO4m5VgD0D1sQ7FOJ3hwOa?dl=0
From the downloaded sample code, go to the following directory:
gen_udp/scriptsEdit file params.json
Ensure the simulator IP address and port numbers match those coded in file params.json.
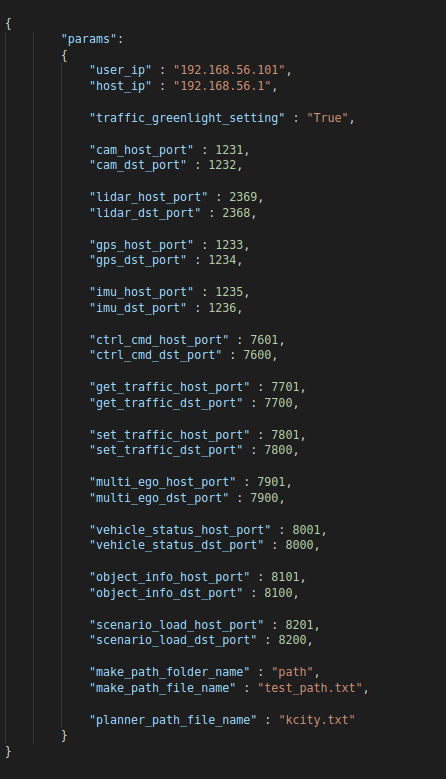
Default port numbers
ego ctrl cmd : 7601, 7600
get traffic : 7701, 7700
set traffic : 7801,7800
multi ego : 7901, 7900
vehicle status : 8001, 8000
object info : 8101, 8100
Scenario : 8201,8200
Run code for driving test
Run code
Change terminal directory to gen_udp/scripts
python gen_planner.py
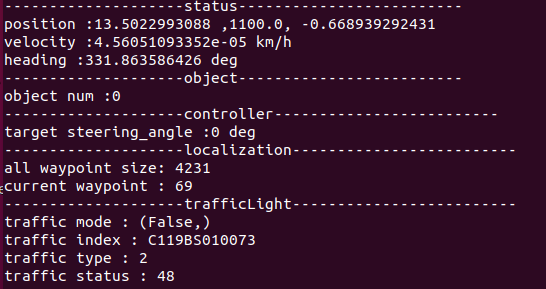
After code execution, the following result will be displayed on the Terminal
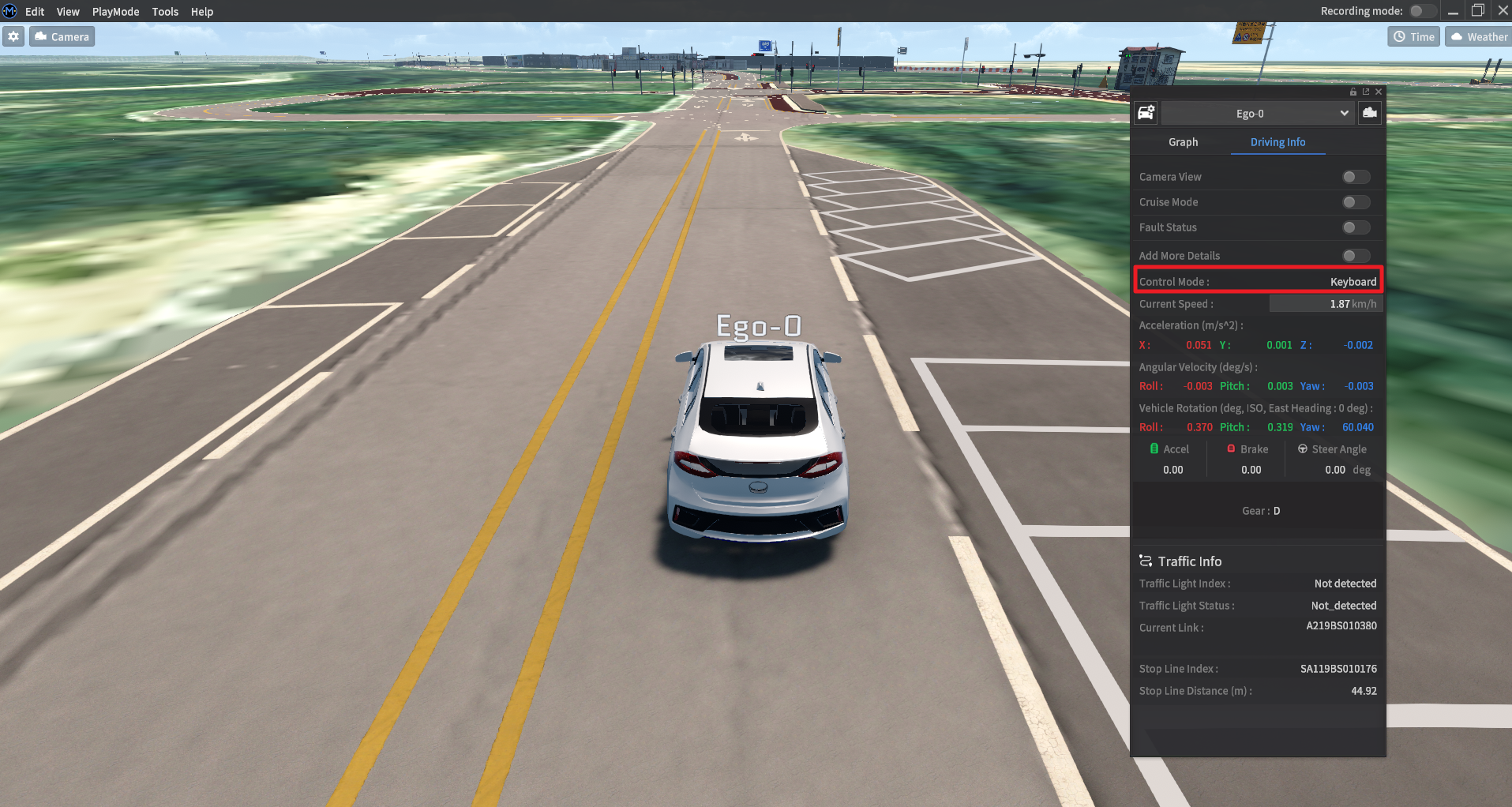
After code is executed, press Q on Simulator screen to transition from Keyboard Mode to AutoMode
AutoMode enables the vehicle to drive autonomously
The current driving mode can be checked by clicking the vehicle, selecting Vehicle info – Setting, and inspecting the popup window.
Refer to this link on how to control the simulator: Basic Control
See the link for more information on how to use our example code: vGen Example Code Guide