Replay Mode
Overview
The Replay Mode feature in MORAI SIM enables playback of recorded vehicle movements within the simulation environment. Replay Mode is available either when a corresponding rosbag file is available or when interfacing with MORAI SIM with an external ROS environment. This feature relies on rosbag data format, which you can read up about here - rosbag.
There are two different methods of replaying rosbag data.
Rosbag Replay: rosbag files are replayed by importing them directly into the simulator.
Network Replay: rosbag files are played back within a separate ROS environment but communicate the data to the simulator through a rosbridge connection.
Rosbag Replay
Access the Rosbag Replay tool from the main menu bar. Go to PlayMode >> Replay >> Rosbag Replay to bring up the Rosbag File Manager window.
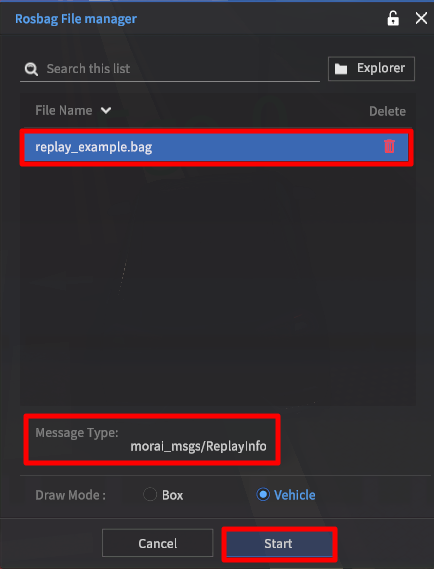
Select a rosbag file from the file list to load it into the simulator. To search in other system folders, click the Explorer button to bring up the file explorer.
If the loading task is successful, the Message Type should load display the default ROS message type /ReplayInfo.
Click the Start button on the bottom of the window to bring up the Replayer Control Panel.
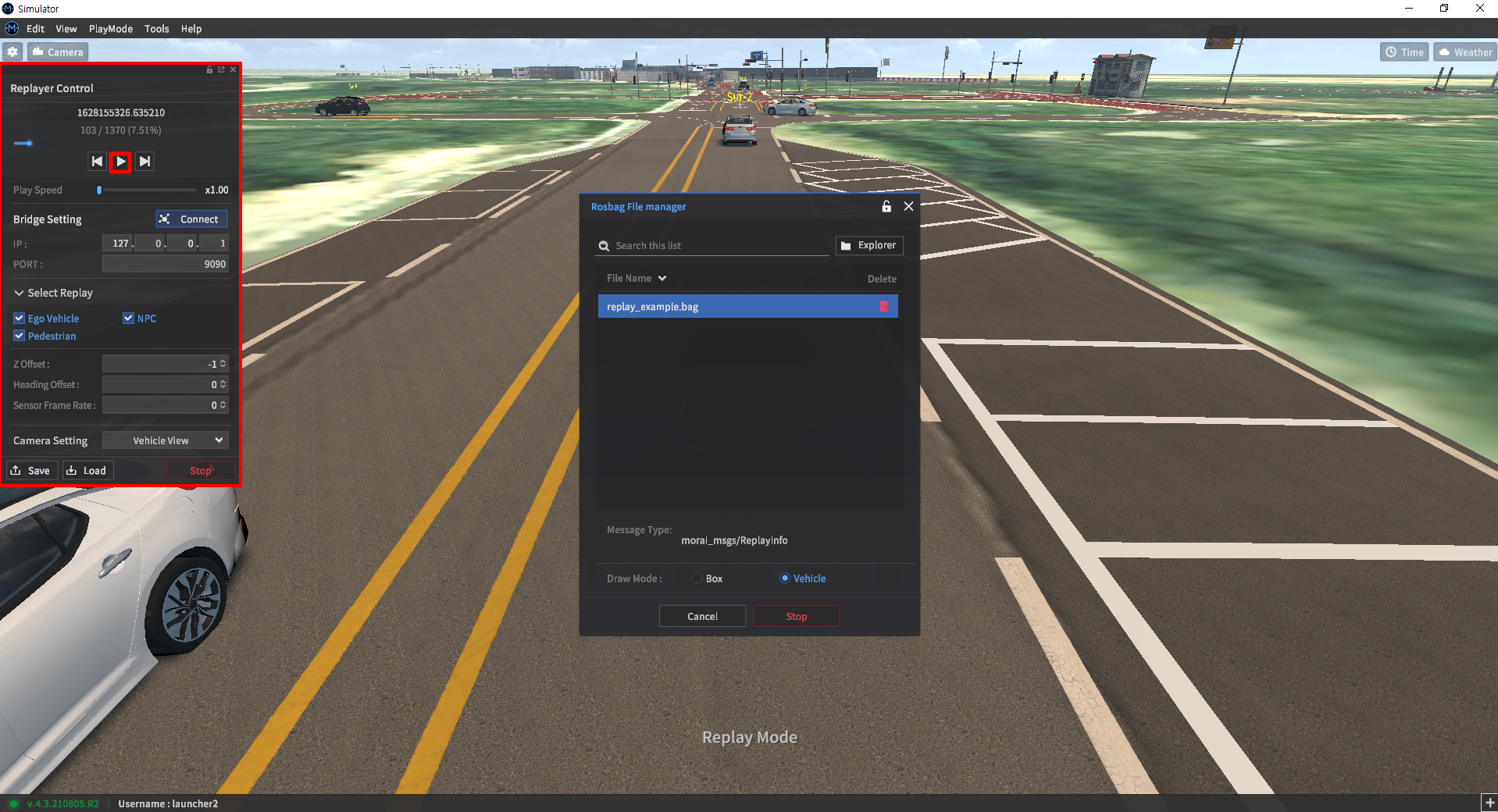
Click the Play button (▷) button found in the Replayer Control Panel to begin data replay.
The Replayer Control Panel
The Replayer Control panel is self-explanatory in that it controls how the rosbag data files are replayed. By default, it appears along the upper-left corner of the main simulation screen.
With the Replayer Control panel, users can:
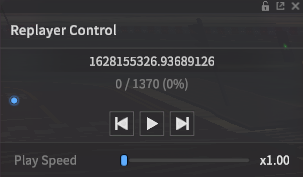
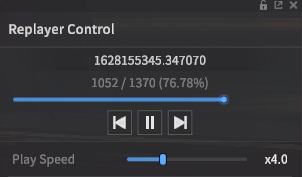
Play, rewind, and fast-forward playback using the main playback controls.
Use the scrubber (seek bar) to search for a specific time marker.
Control the overall playback speed (from 1.0x up to 10x speed)
Numbers indicate the Unix timestamp values of the rosbag data file and the current position of the playback file.
Users can save and load replay settings as well. Saved scenarios can be found by navigating to Scenario - Save&Load.
Replayer Settings
When using the Rosbag Replay mode, the simulator itself is playing the rosbag files and does not automatically broadcast the data. The Bridge Setting panel, however, lets users connect the simulator to a ROS system.
Bridge Setting
The Rosbag data from the replay can be published and viewed in ROS.
ROS message details
Message Type: morai_msgs/ReplayInfo
Default Topic: /ReplayInfo
Select Replay / Offset / Sensor Frame Rate
Select Replay: Check if Ego, NPC, Vehicle, Pedestrian is replayed while playing Rosbag file.
Height Offset: Set Z-axis offset for Ego Vehicle
If the vehicle clashes with ground while Rosbag is replayed as shown in the figure below, use Height Offset function to properly adjust the Ego Vehicle position.
Heading Offset: Heading-wise offset for Ego-vehicle
Sensor Frame Rate: Sensor data save rate (Hz) for vehicle-attached sensor during Rosbag Replay
Camera Setting
Perspective View: Free view of the camera
Top View: Top-down view
Vehicle View: Third-person view of the vehicle
Rosbag Replay control using ROS message
ROS messages can be published to control replay functions.
Options, perspective, and replay speed of the replay can be controlled.
Refer to detailed control instructions in the following link
Select Mode Option in Rosbag Replay Window
VEHICLE: Surrounding vehicles are shown as-is
BOX: Surrounding vehicles are shown as boxes

Vehicle display

Box display
Network Replay
Rosbag file is played in ROS environment by subscribing to data via rosbridge
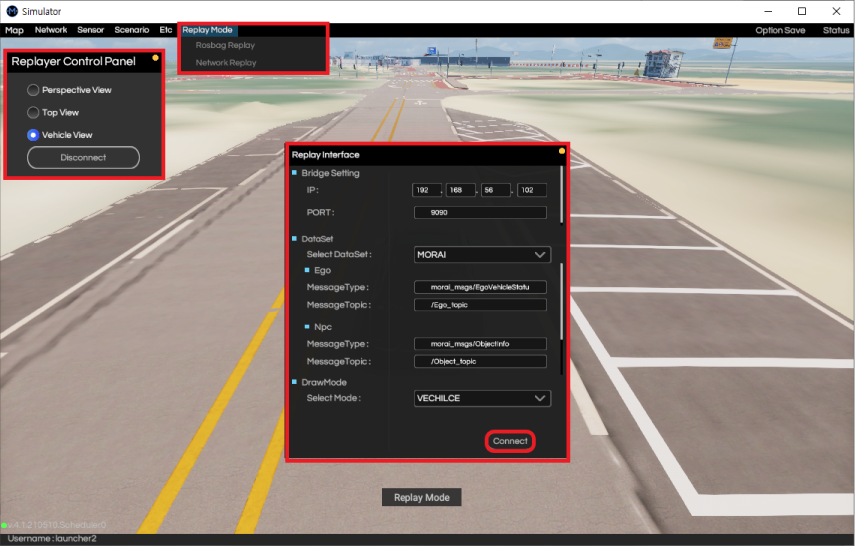
Enter IP and Port numbers in Bridge Setting to set up rosbridge IP and Port numbers for playing Rosbag file in ROS environment
Select ‘Connect’ to check Replayer Control Panel in upper left-hand corner.
Check and select Dataset and Draw Mode.
Play Rosbag file in ROS environment
Option
Replayer Control Panel
After connection is established, the perspective of the Rosbag replay simulation can be selected from the Replayer Control Panel.
Perspective View : Free view of the camera
Top View : Top-down view
Vehicle View : Third-person view of the vehicle
After connection is established and Replayer Control Panel is popped up, the replay is executed using Rosbag file published by Ubuntu

ROS Environment Setting
Run Ros bridge
$ roslaunch rosbridge_server rosbridge_websocket.launch
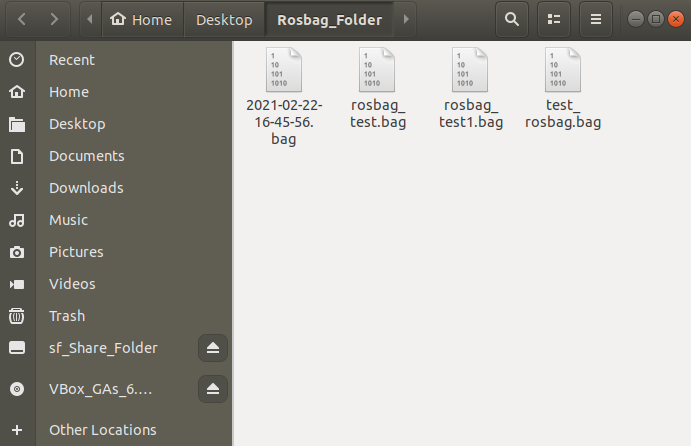
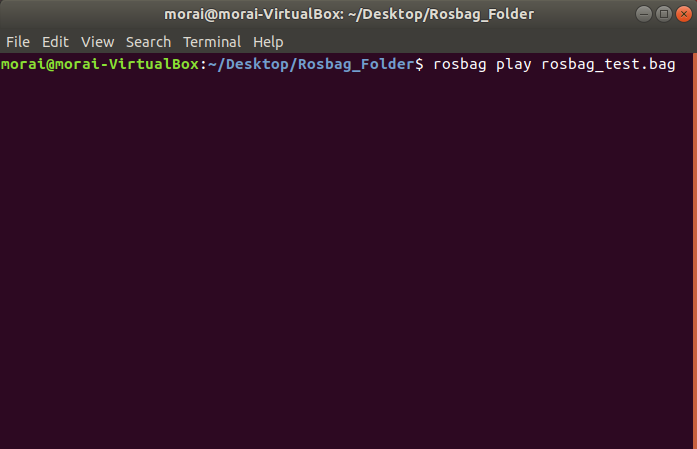
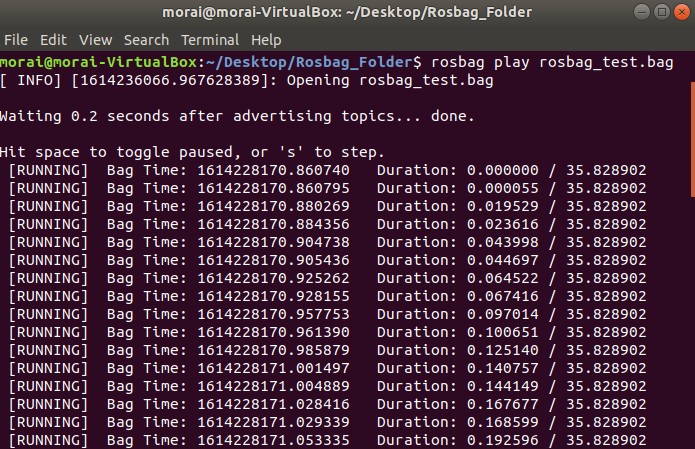
Play Rosbag file
Change terminal directory to Rosbag file save location
$ rosbag play (Rosbag filename.bag)
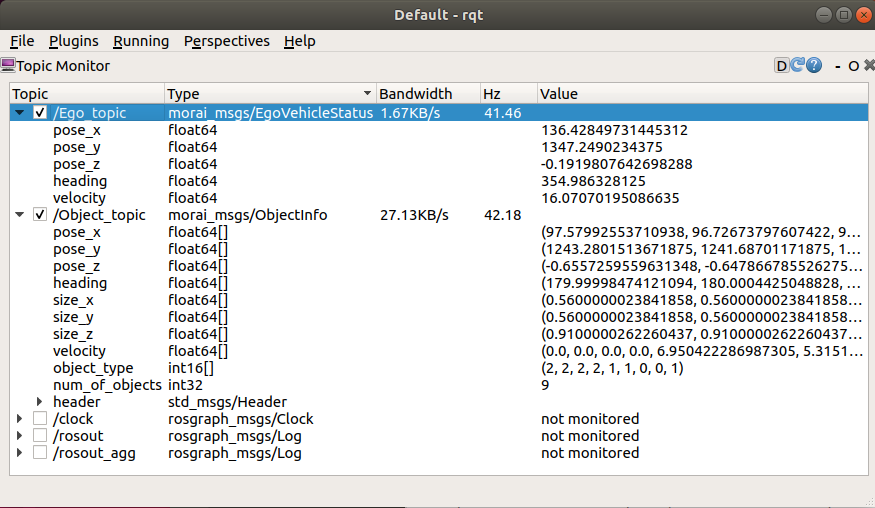
The published data after Rosbag play can be viewed by using rqt function
ETC
Generate Rosbag File
Rosbag file can be generated by saving ROS Topic data in .bag format in Ubuntu environment.
In Ubuntu environment, connect with rosbridge after starting Simulator.
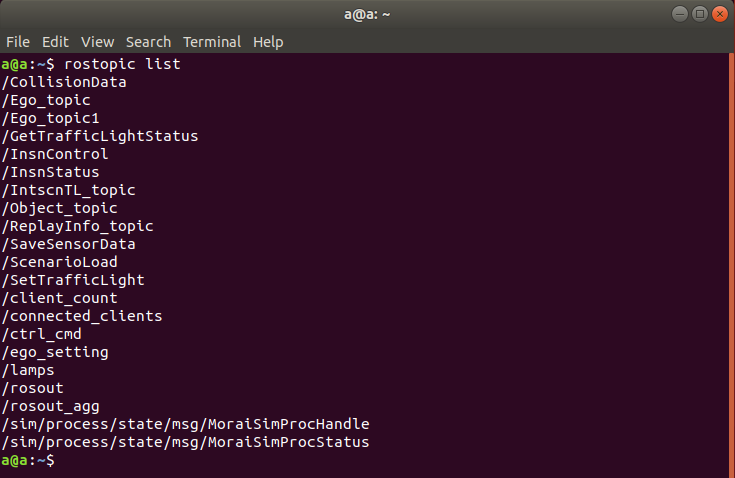
Check ROS Topic
$ rostopic list
Displays a list of connected ROS Topics
ROSbag file generation
$ rosbag record /ReplayInfo_topic
ReplayInfo_topic includes the following data.
Ego related information
ego_acc
ego_brake
ego_steer
ego_orientation_x
ego_orientation_y
ego_orientation_z
ego_orientation_w
ego_linearAcceleration_x
ego_linearAcceleration_y
ego_linearAcceleration_z
Object(NPC Vehicle, Pedestrian, Obstacle) related information
num_of_object
object_type
object_id
pose_x :
pose_y
pose_z
heading
size_x
size_y
size_z
velocity
Refer to following link for detailed description of ROS messages
While running Rosbag record, .bag files are saved in the current terminal directory.
Save Rosbag File
Move the generated Rosbag file into Data\SaveFile\Rosbag of Launcher folder.
Click Replay Mode - Rosbag Replay in top menu, click ‘Open’ to view Rosbag save file directory
Rosbag Replay Examples
Download the sample rosbag example from this link.
Rosbag Replay example video
Network Replay example video