Release Notes 22.R1.1
Release Date | 2022/03/29 16:00 PM (GMT +9) |
Simulator | MORAI SIM: Drive ST |
Version | 22.R1.1 |
Updates
New versioning system
Starting from version 22.R1.1, MORAI SIM versions now follow a
[Year][Release Cycle][Version #]system.
Map and environment updates
R_KR_PR_SejongBRT0
Added fencing and more visual detail to impassible regions (along the centerline).
Improved terrain and road surface continuity.
NPC parameters
Added new parameters for greater control of NPC vehicles.
Scenario editor QOL improvements
When placing NPC vehicles, MORAI SIM now remembers if you are using the
Random Vehiclesetting.
MORAI SIM gRPC API
MORAI SIM supports a new gRPC API.
Coordinate display feature
You can now click on parts of the 3D environment to return coordinate data.
Viewfinder save feature
You can now save a list of camera positions for the main viewfinder.
This feature addresses issues where users would set up the viewfinder to record a scene, only to be automatically sent elsewhere in scenario mode.
Improved lidar sensor data capture
When using sensor capture for lidar sensors, rotation values (roll, pitch, yaw) are also saved to the instance file.
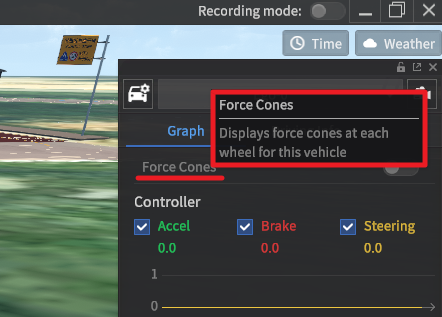
Introducing Tooltips
Hovering the mouse cursor over certain menu titles or icons will now display a short tooltip with additional information.
Changes to the default coordinate systems
Obstacles now conform to an ENU coordinate system.
New names for ROS protocols
Updated the protocol name for loading scenarios from KaistSLSubscriber to MoraiSLSubscriber.
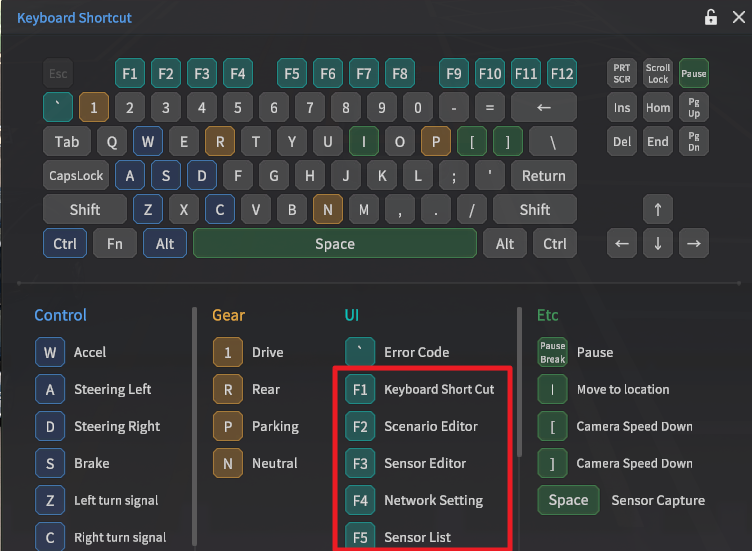
Support for Hotkeys
The keyboard function keys are now shortcuts to commonly used features. For quick reference, use the F1 key to view the keyboard legend.
Bug Fixes
Resolved a reverse compatibility issue where older versions of scenario
.jsonfiles would not load properly.Fixed a bug that would not save the initial starting point when building custom maps. Requires users to download a new version of the
AssetbundleEditor.dllfileFixed an issue where the internal driver logic for the 2020 Kia Stinger would behave erratically.
Vehicles generated by spawn points now reach their target speed.
The Ioniq vehicle model’s reverse (backup) lights now turn off properly when shifting out of reverse.
Resolved an issue that prevented the camera sensor view from changing aspect ratios.
When using the Sensor Capture Mode for lidar sensor data with lidar error applied, each point cloud data point would have a different error value depending on intensity. This behavior has been changed to apply constant error values across all points regardless of intensity.
Added physical modeling for a parking handbrake to prevent cars from slowly creeping downhill while parked.