Customizing map initial conditions
This page describes Ego Init Setting, a function that enables users to configure the initial location state information of the Ego Vehicle. The user can edit the position and rotation value of the Ego Vehicle via placing the Ego Vehicle in a different location or loading them from the previously saved file. Read along the rest of the documentation for details.
Initial ego-vehicle location
Init Ego State is a function to edit and save the initial starting location of the ego-vehicle. When resetting the simulation either manually with the I key or using batch simulation, the simulator will reference this initial location each time.
Editing the initial ego state
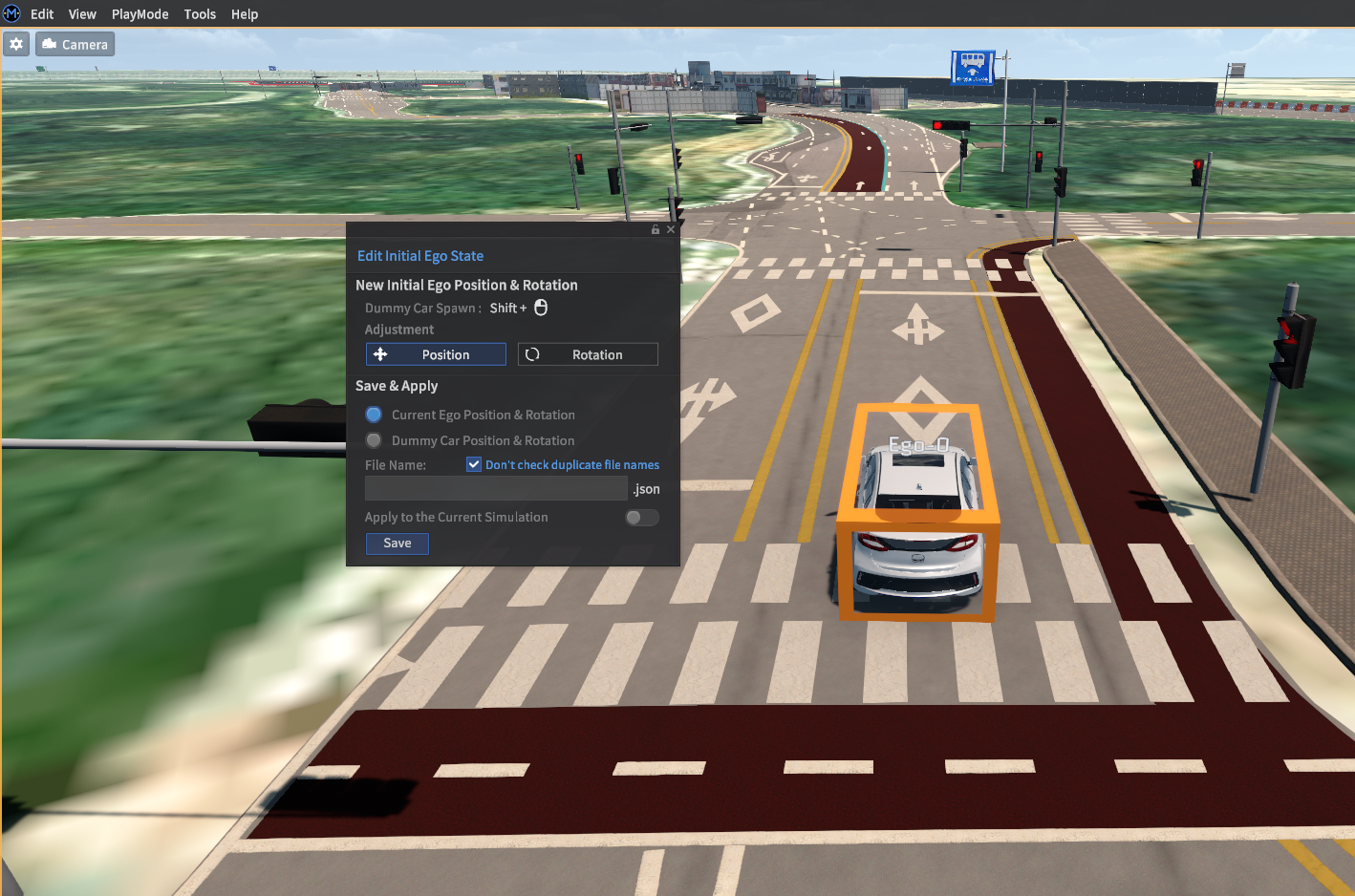
Init Ego State can be changed from the Initial Map settings menu at Edit >> Map Init Settings >> Edit Init Ego State.

Once the Edit Initial Ego State window is open, the user is presented with two options:
Current Ego Position and RotationDummy Car Position and Rotation
By default, the simulator takes the position and rotation values of the current ego-vehicle Ego-0.
Exit this window at any time with the escape key, or by saving the new initial starting location.
Updating only the current position of the ego-vehicle however, makes it difficult to set the initial position precisely. Since the default method of moving the ego is to drive it using either the keyboard or a wheel controller, the simulator also offers a click-and-drag method using a so-called dummy car.
Using the dummy car model
While the Edit Initial Ego State window is open, press Shift + Left-click to place the dummy car model into the simulation scene. Unlike the ego-vehicle model, this dummy vehicle model can be intuitively clicked and dragged to a desired location.
The vehicle model of the dummy vehicle will always be identical to the ego-vehicle.
Remember to set the save option to Dummy Car Position and Rotation.

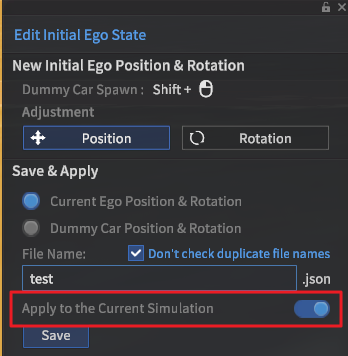
Once the dummy vehicle has been placed, clicking the Save button with the Apply to the Current Simulation option enabled (more on this in the next section) will move the ego-vehicle to the dummy vehicle's location.

Saving and loading configurations
Saving an initial map setting is attached to the Edit Initial Ego State window (for now). Simply follow the processes described in previous sections to save new initial conditions. Any new configurations are saved as .json files.
The Apply to the Current Simulation option will apply any configuration changes to the current simulation instance. Otherwise, any configuration changes will be applied when the map is re-loaded.
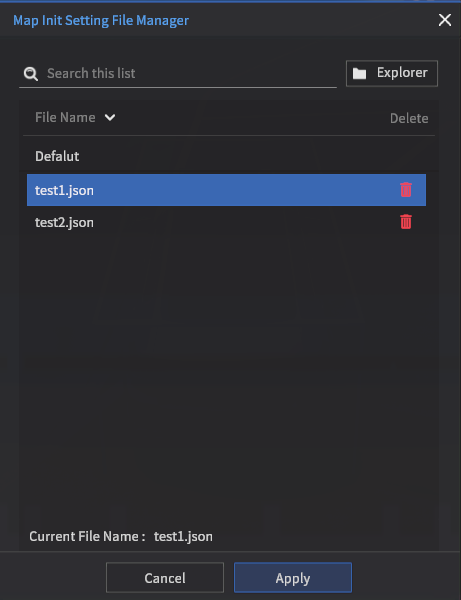
To load a previously saved initial map setting file, go to Edit >> Map Init Settings >> Load Init Ego State. A corresponding file manager window should appear, where users can manage or open their saved .json files.